Krótka charakterystyka programu
Program Trasa przeznaczony jest do rozwiązywania problemów z dziedziny kombinatoryki a dokładnie problemów VRP (Vehicle Routing Problem). Zagadnienia te są od lat rozwijane na świecie i dostępna jest duża ilość informacji na ten temat. W programie aktualnie zrealizowane są opcje obliczeniowe dla:
- TSP (Traveling Salesman Problem) - problem komiwojażera,
- SD-MTSP (Single Depot Multiple Traveling Salesman Problem) - rozbudowany TSP - problem wielu komiwojażerów, startujących ze wspólnej lokalizacji),
- MD-MTSP (Multi Depot Multiple Traveling Salesman Problem) - rozbudowany TSP - problem wielu komiwojażerów, startujących z różnych lokalizacji),
- CVRP (Capacitated Vehicle Routing Problem) - dostarczanie towarów z centralnego magazynu przy jak najkrótszych trasach i jak najmniejszej liczbie pojazdów,
o określonej ładowności),
- VRPTW (Vehicle Routing Problem with Time Windows - problem komiwojażera | wielu komiwojażerów z nałożonymi ograniczeniami w postaci okien czasowych w poszczególnych lokalizacjach - wyznaczanie najkrótszych tras (minimalnych czasów) przejazdu),
- CVRPTW (Capacitated Vehicle Routing Problem with Time Windows - dostarczanie towarów z centralnego magazynu przy jak najkrótszych trasach i jak najmniejszej liczbie pojazdów, o określonej ładowności, z nałożonymi ograniczeniami w postaci okien czasowych oraz wymaganego ładunku, w poszczególnych lokalizacjach).
Program pozwala na optymalizację tras przejazdu ze względu na najkrótszą trasę (czas przejazdu) oraz minimalizację liczby pojazdów. W programie Trasa obliczenia są realizowane głównie z wykorzystaniem zestawu autorskich algorytmów heurystycznych.
Zastosowany interfejs graficzny pozwala na obserwację przebiegu obliczeń, włączanie i wyłączanie prezentacji punktów (miast, klientów) oraz ich opisów. Można powiększać dowolne fragmenty ekranu i szczegółowo obserwować zmiany tras podczas obliczeń. Dodatkowo program zawiera na przykład:
- opcję podglądu rozmieszczenia punktów
- podglądu wybranej trasy
- wybór najlepszego rozwiązania spośród wielu wygenerowanych
Program z jednej strony pozwala na rozwiązywanie problemów "teoretycznych" - specjalne testy opracowane dla zagadnień VRP (o liczności nawet kilkuset tysięcy lokalizacji), które pozwalają na ocenę jakości zastosowanych algorytmów a z drugiej strony umożliwia wykorzystanie tych procedur do różnych praktycznych zagadnień transportowych (Przykłady).
W części praktycznej, program korzysta z dwóch serwisów: Google API (Geocoding API, Directions API) lub Openrouteservice API (Directions API), aby wyznaczyć współrzędne geograficzne oraz odległości i czasy przejazdu między poszczególnymi lokalizacjami. Dodatkowo program prezentuje lokalizacje oraz trasy na mapach. Wszelkie prace związane z Google API (wyznaczanie: współrzędnych geograficznych, odległości i czasów przejazdu oraz prezentacje lokalizacji na mapie itp.) mogą się wiązać z opłatami - konieczny jest klucz dostępu do API Google. Aktualnie można korzystać z tych funkcji za darmo (oczywiście przy pewnych limitach). Dla przypadku Openrouteservice nie ma takiego problemu - serwis jest darmowy.
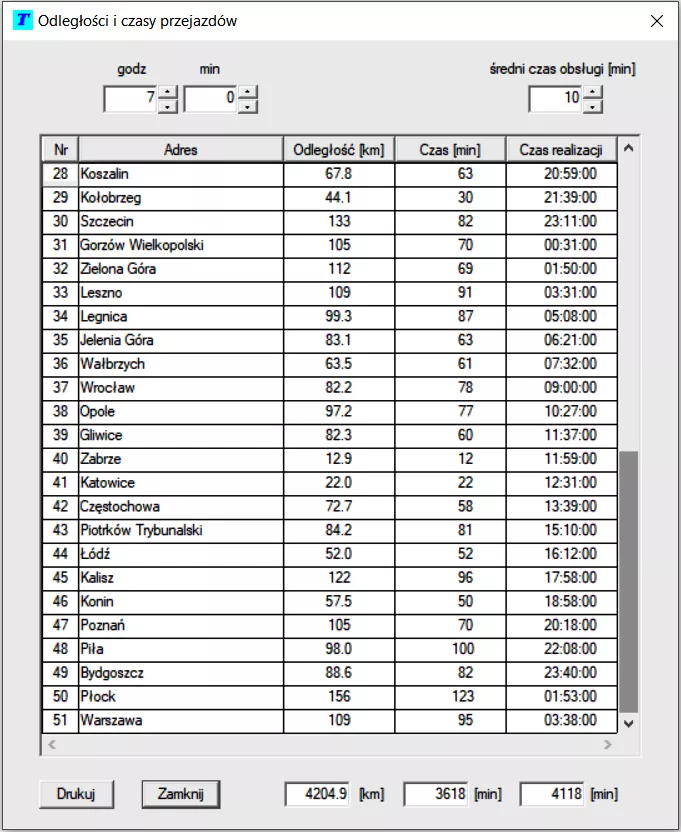
W efekcie obliczeń optymalizacyjnych, na przykład dla TSP, użytkownik programu uzyskuje optymalną trasę przejazdu, pozwalającą na oszczędności czasu, paliwa oraz zaangażowanie mniejszej ilości kierowców. Poza tym nie traci czasu na każdorazowe ustalanie kolejności przejazdu przez poszczególne lokalizacje i zapobiega wyznaczaniu niemożliwych do realizacji, w danym czasie, tras przejazdów (tutaj można wykorzystać SD-MTSP lub MD-MTSP). Program generuje gotowe do wydruku tabele:
{kind=link}
- z ustaloną kolejnością lokalizacji
- z podanymi realnymi odległościami i czasami przejazdów
- uwzględnia średni czas obsługi danego punktu
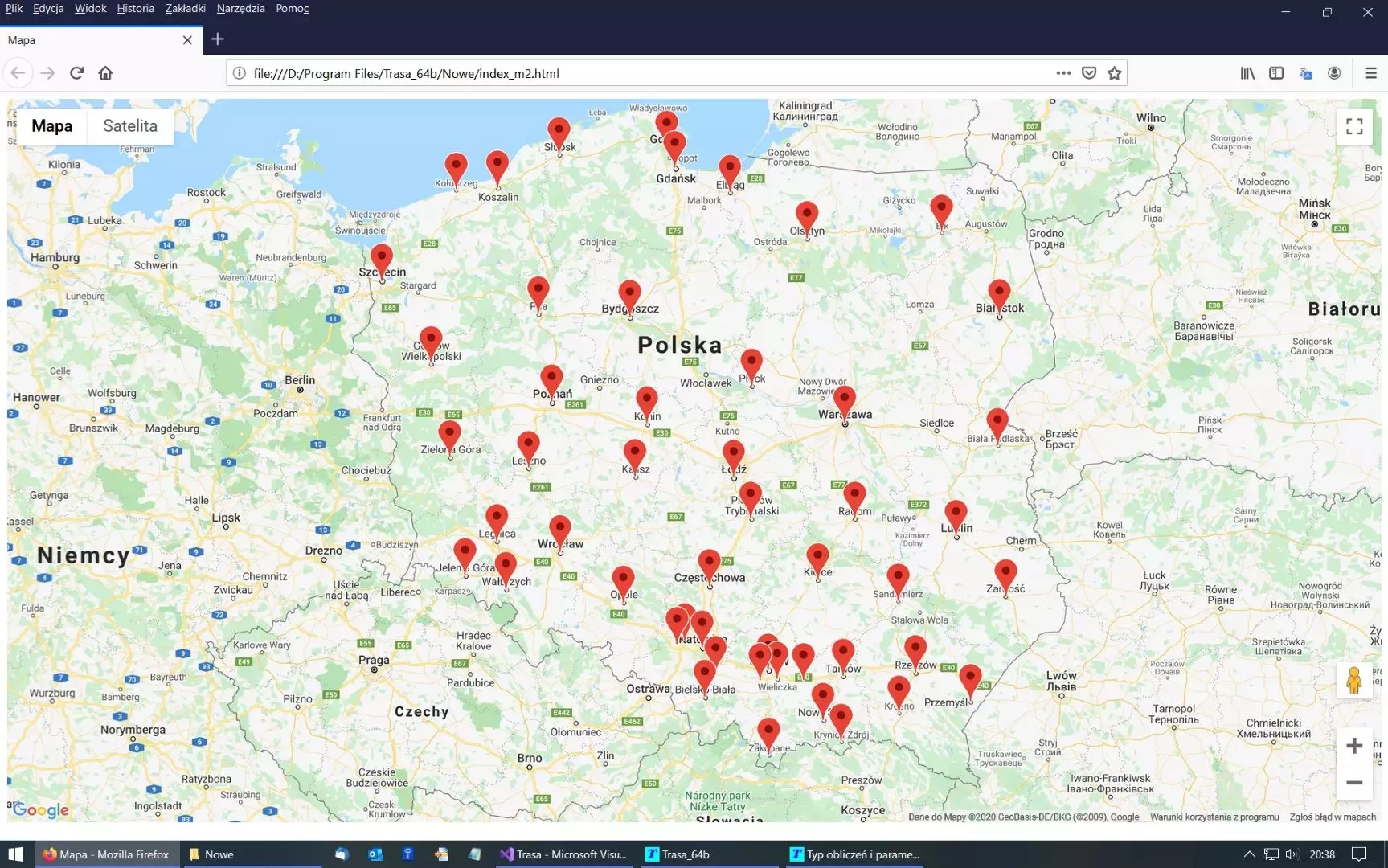
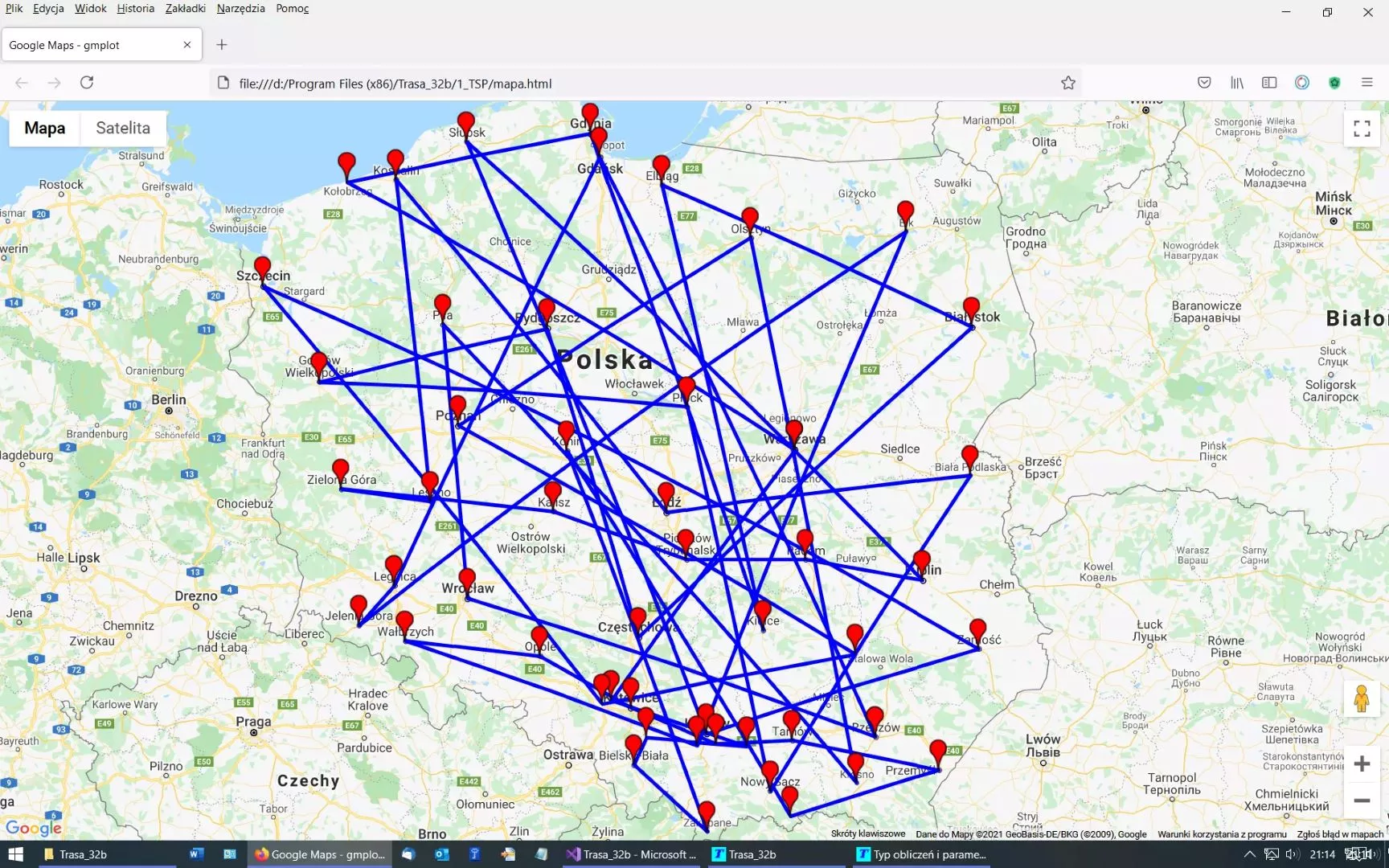
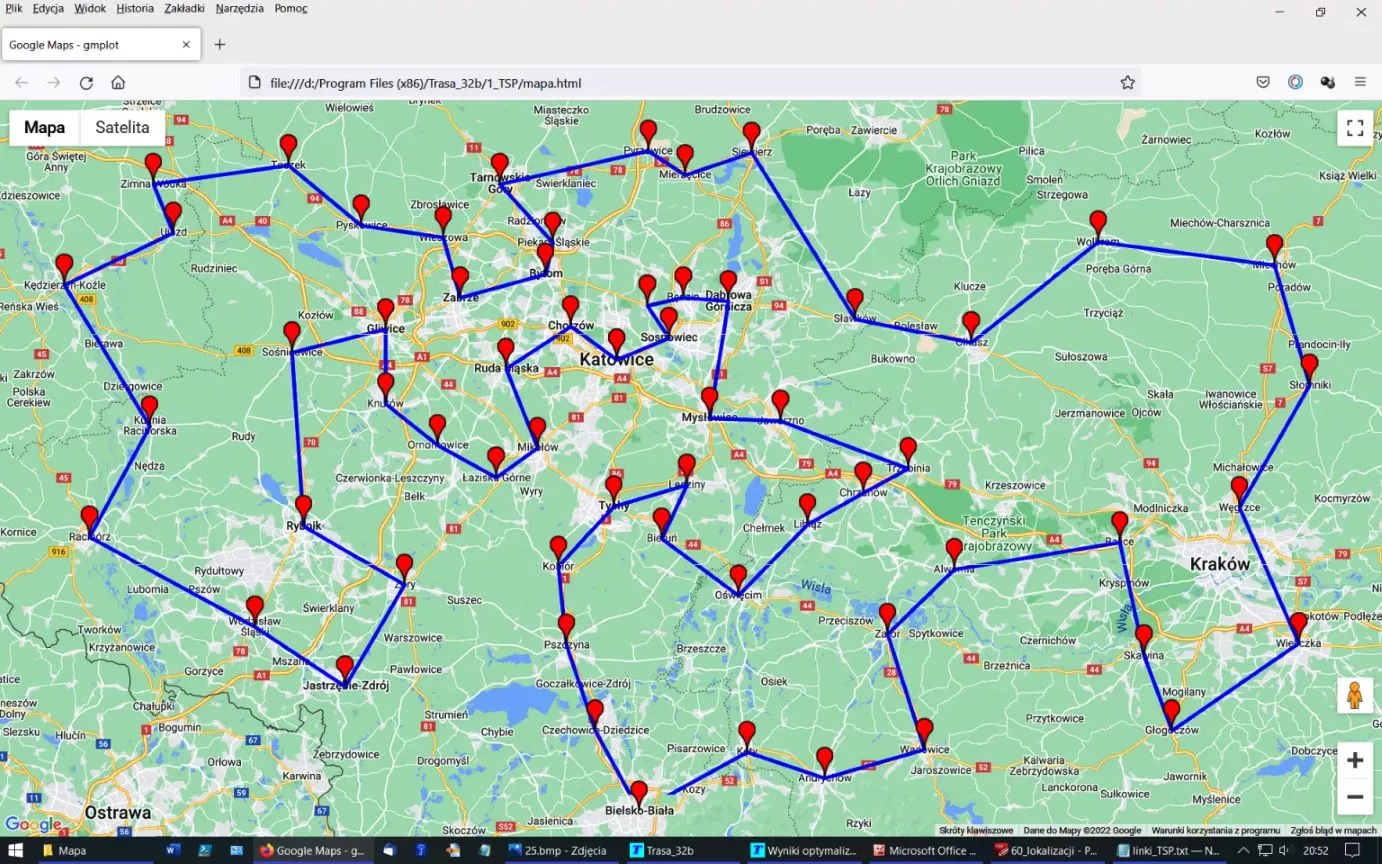
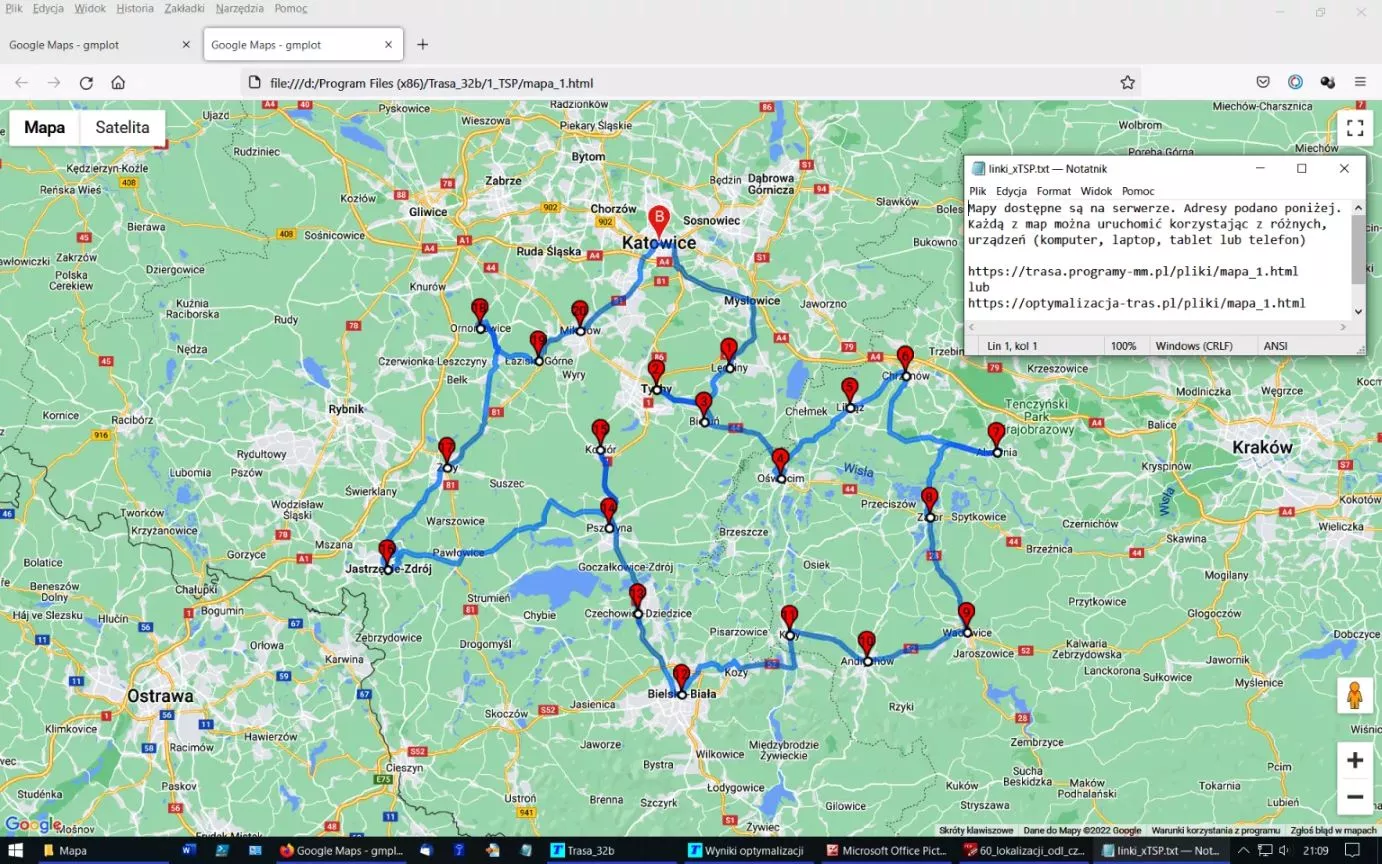
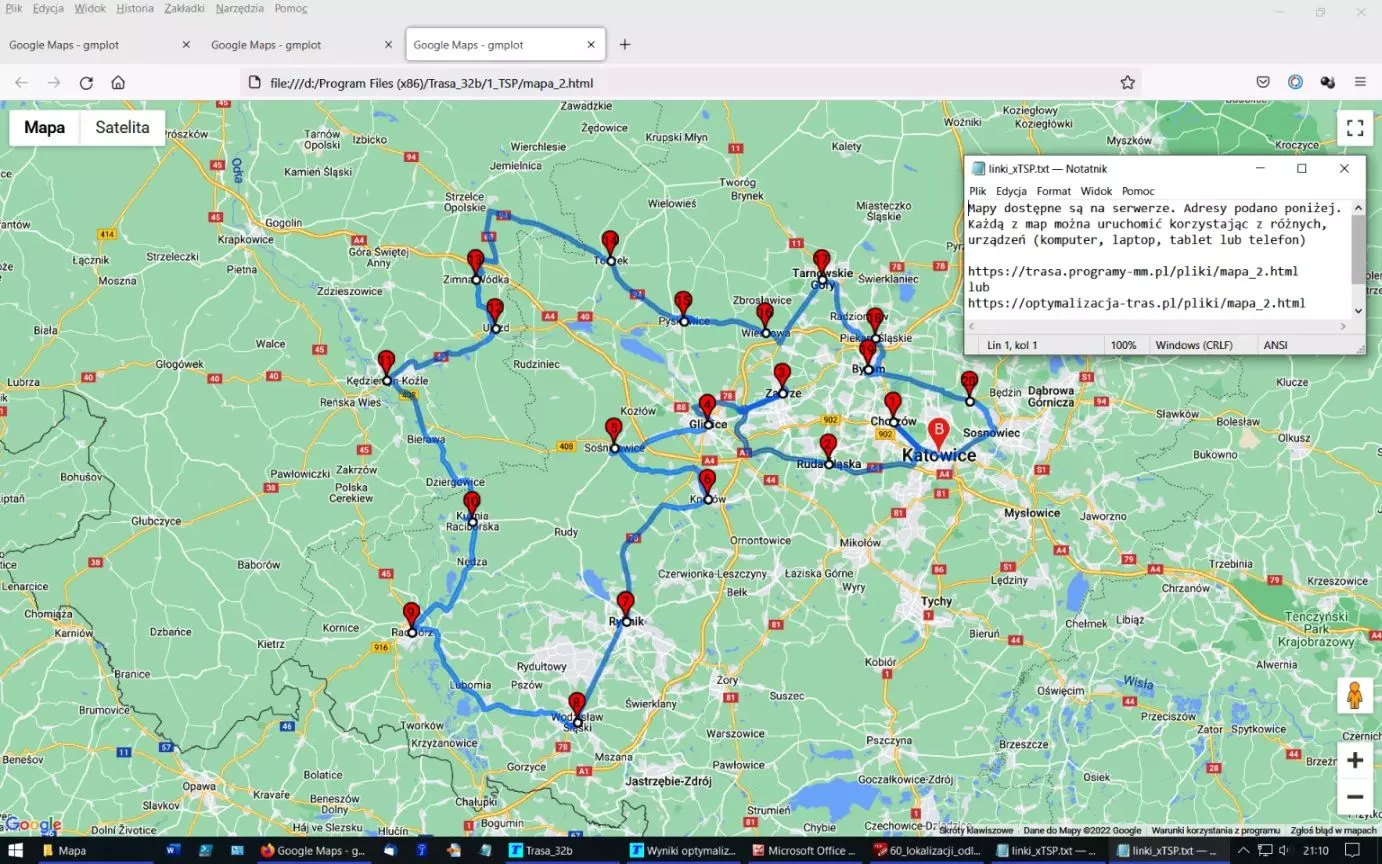
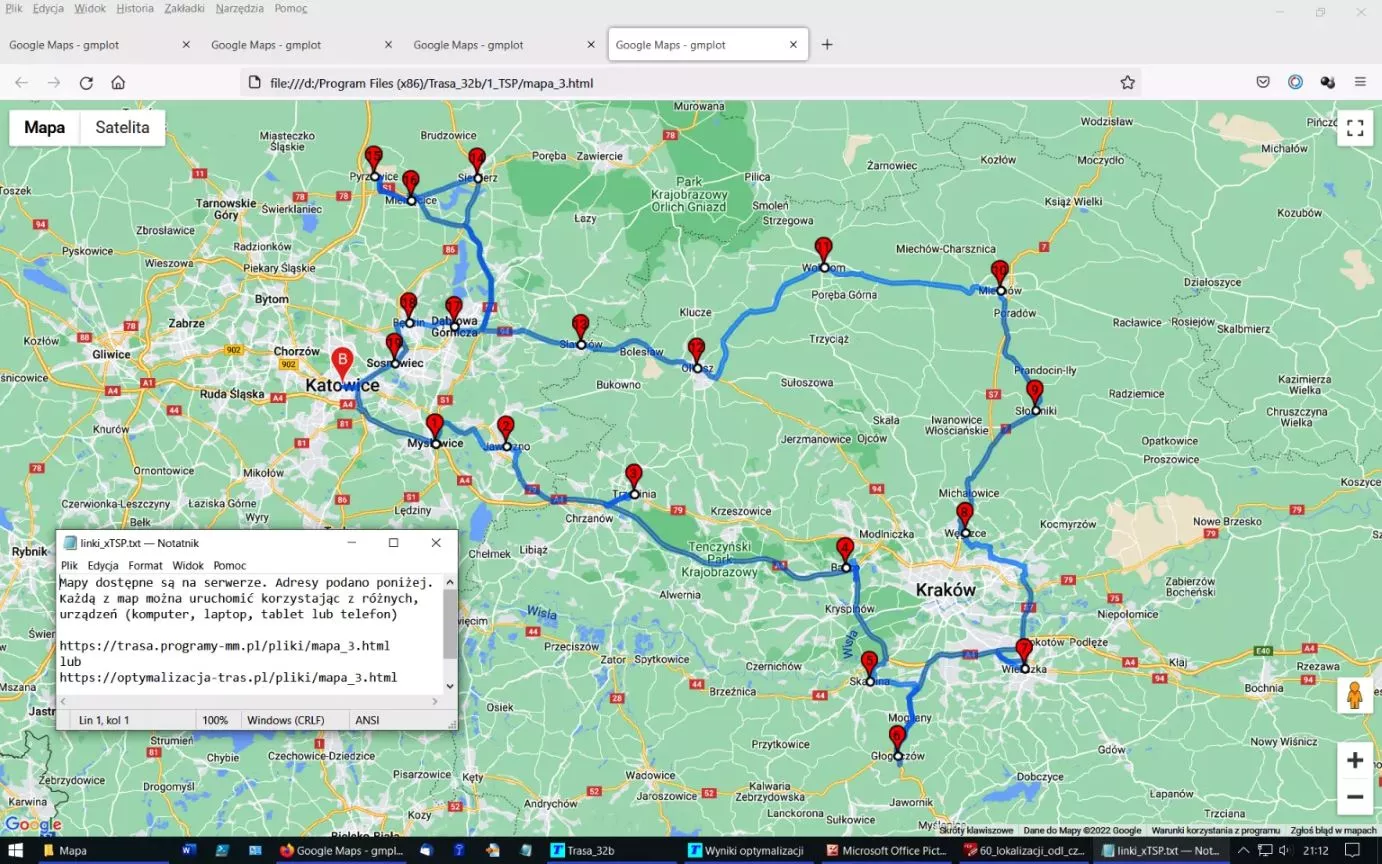
- prezentuje na mapie: zestaw lokalizacji, trasę początkową (losową, przed optymalizacją) i trasę po optymalizacji oraz
- szczegółowe mapy z trasami dla poszczególnych pojazdów (dla SD-MTSP lub MD-MTSP).
Oto kilka przykładów:
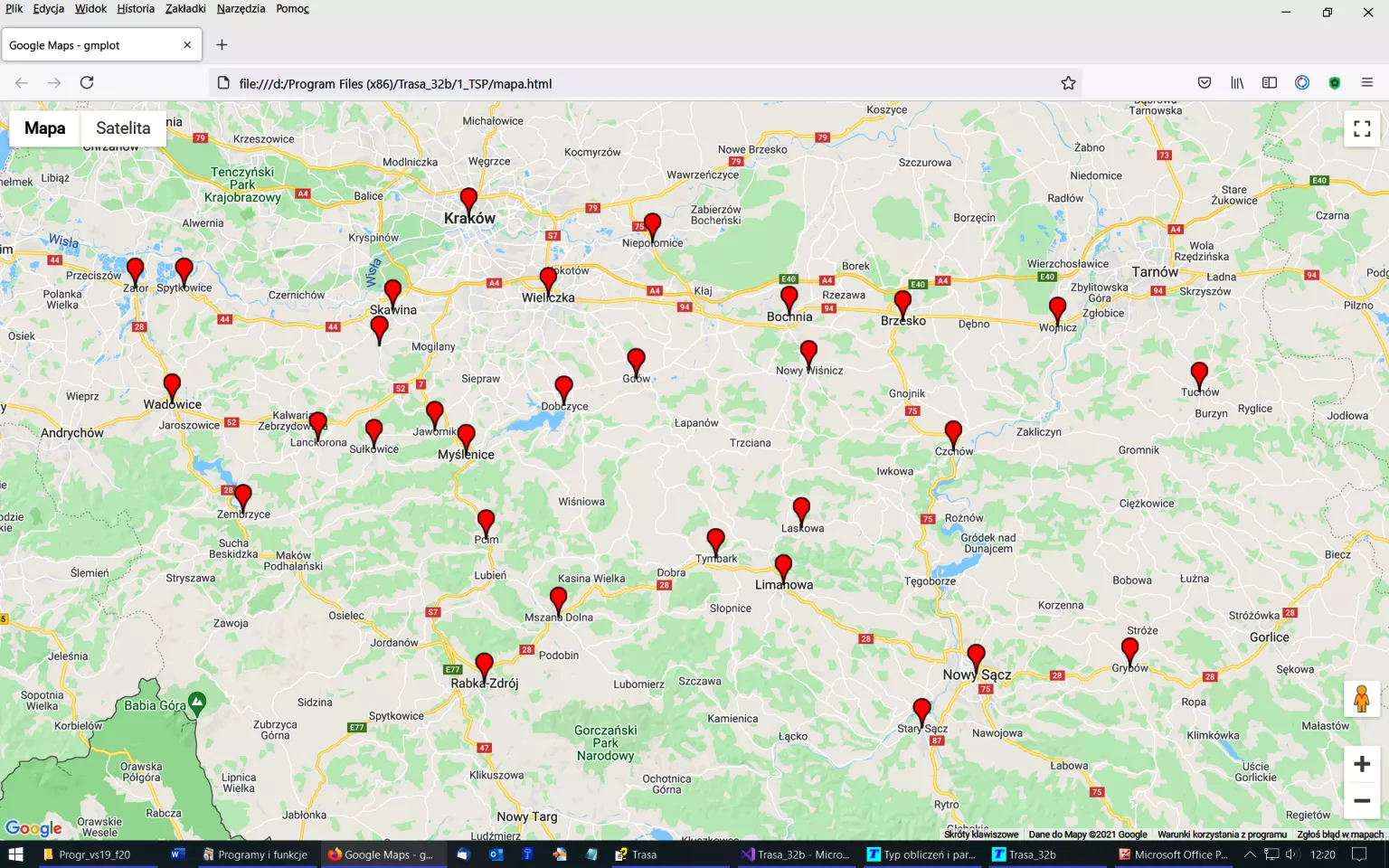
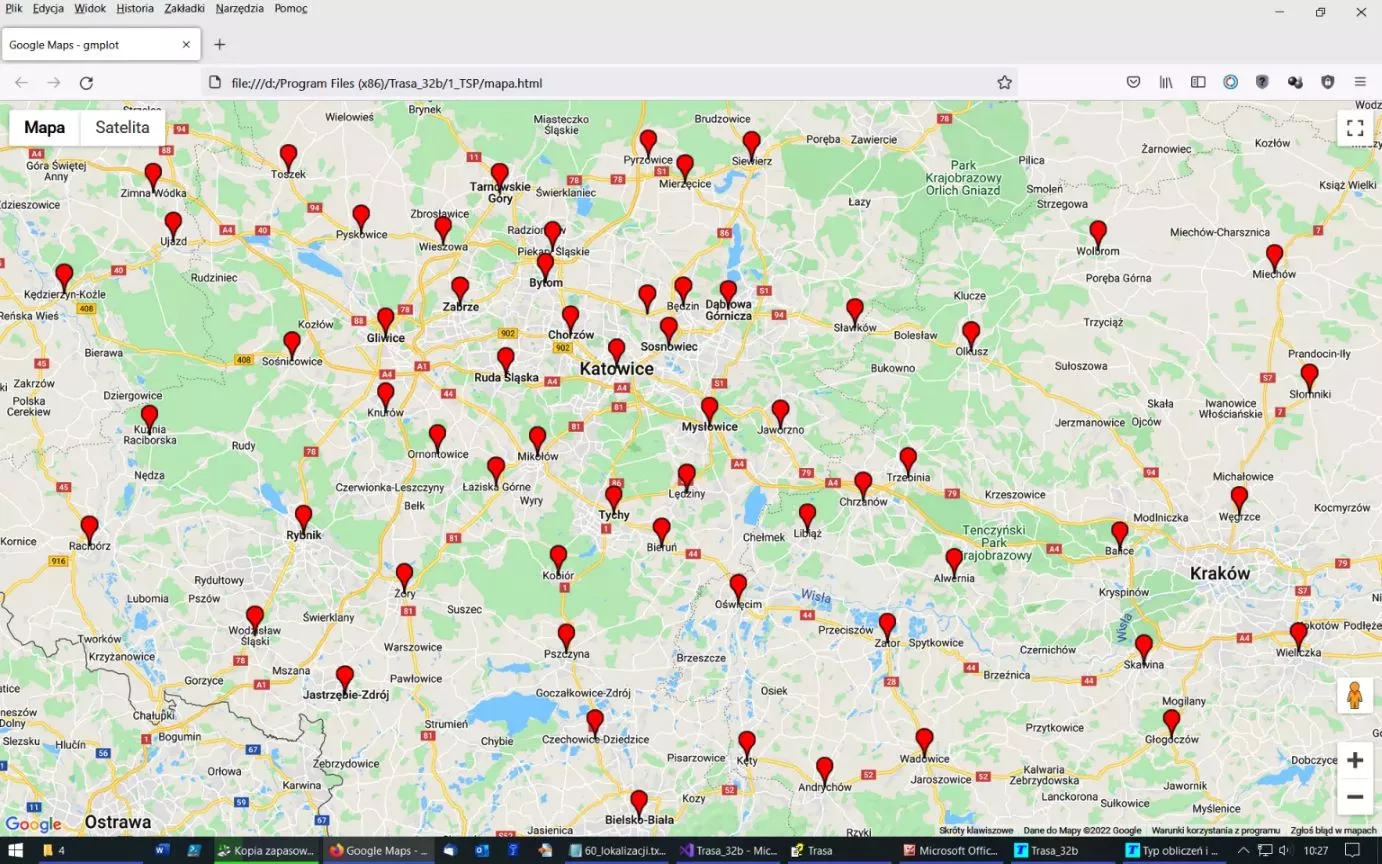
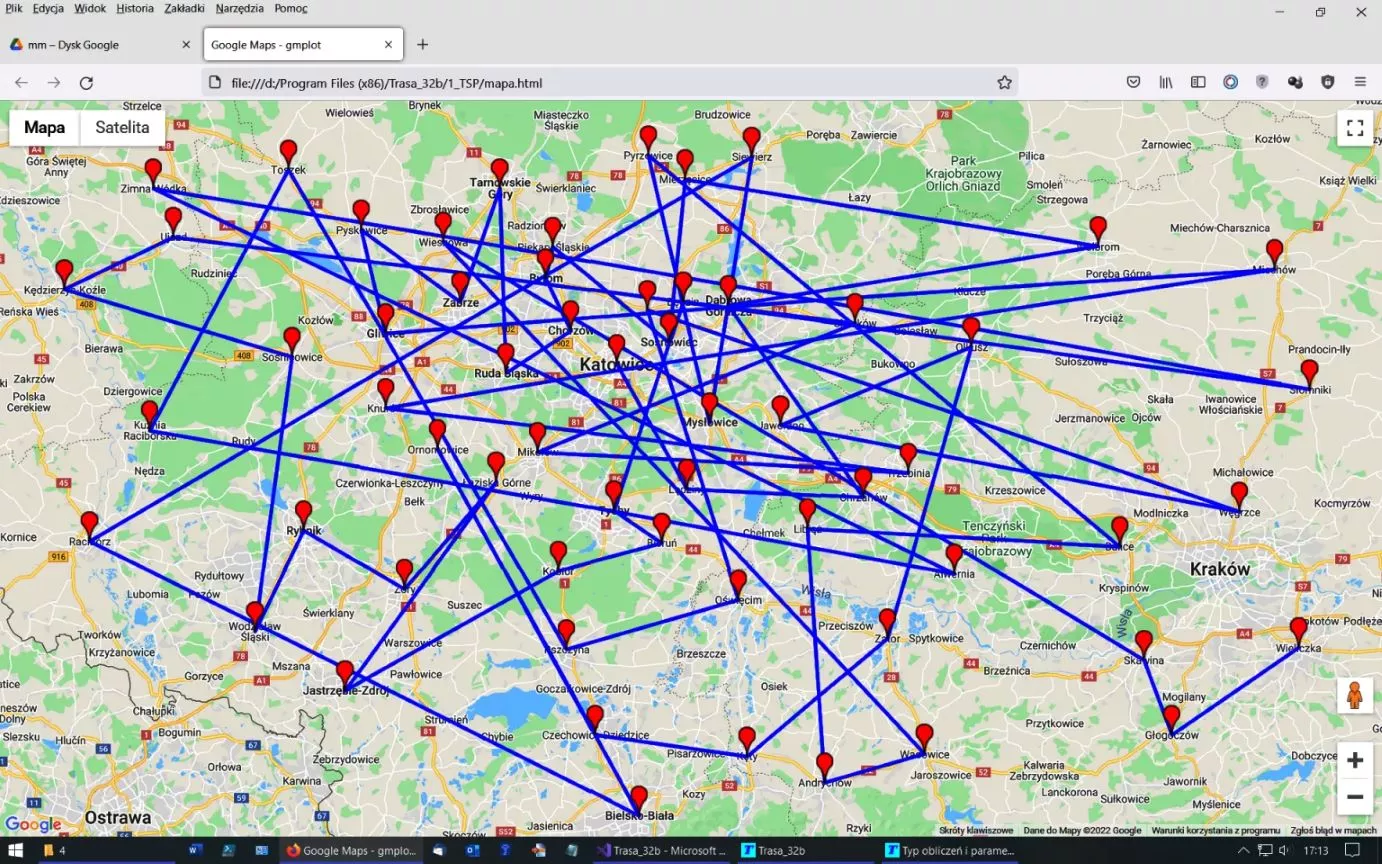
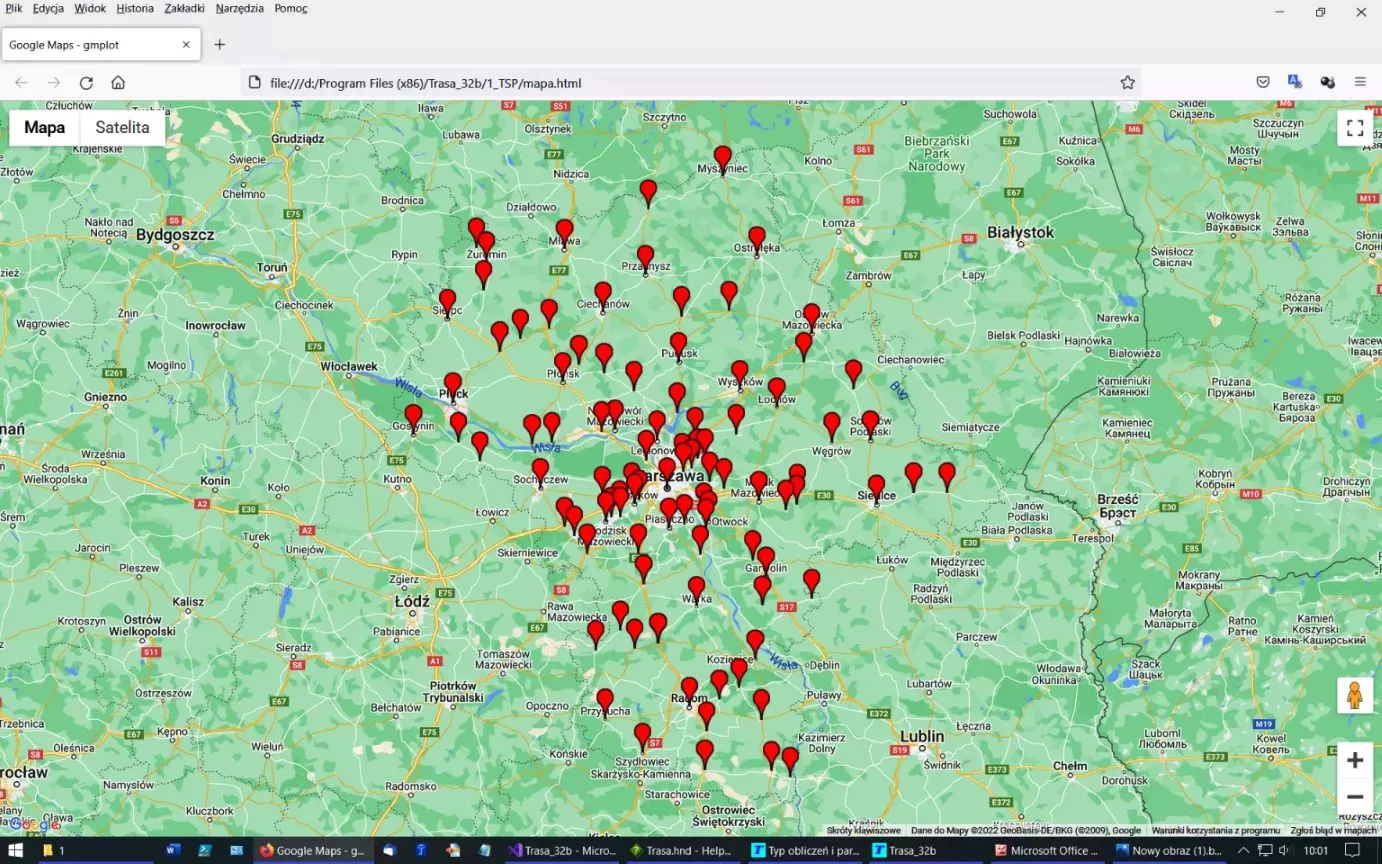
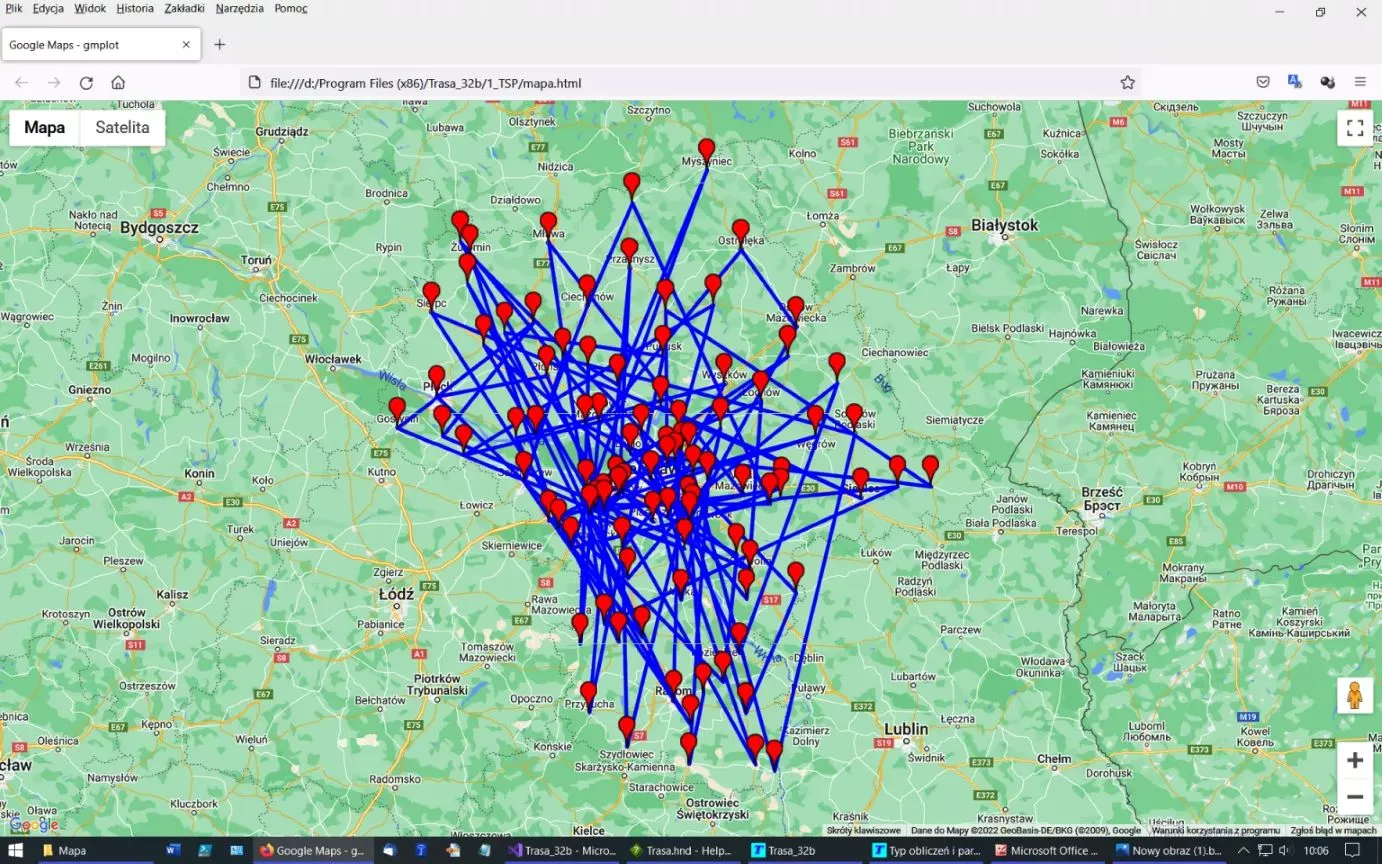
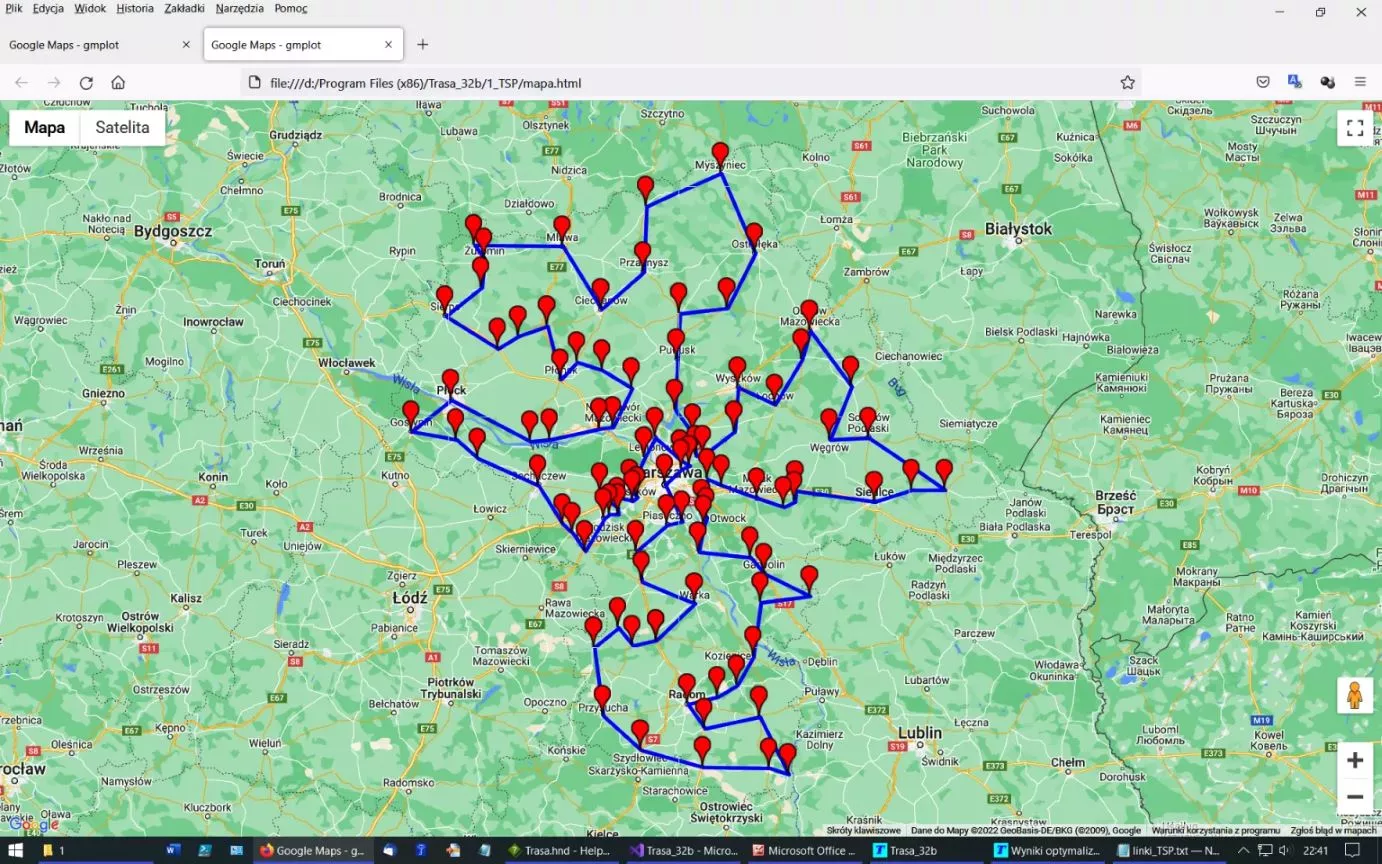
TSP - mapy Google: 50 lokalizacji: zestaw 50 lokalizacji, trasa początkowa i trasa po optymalizacji
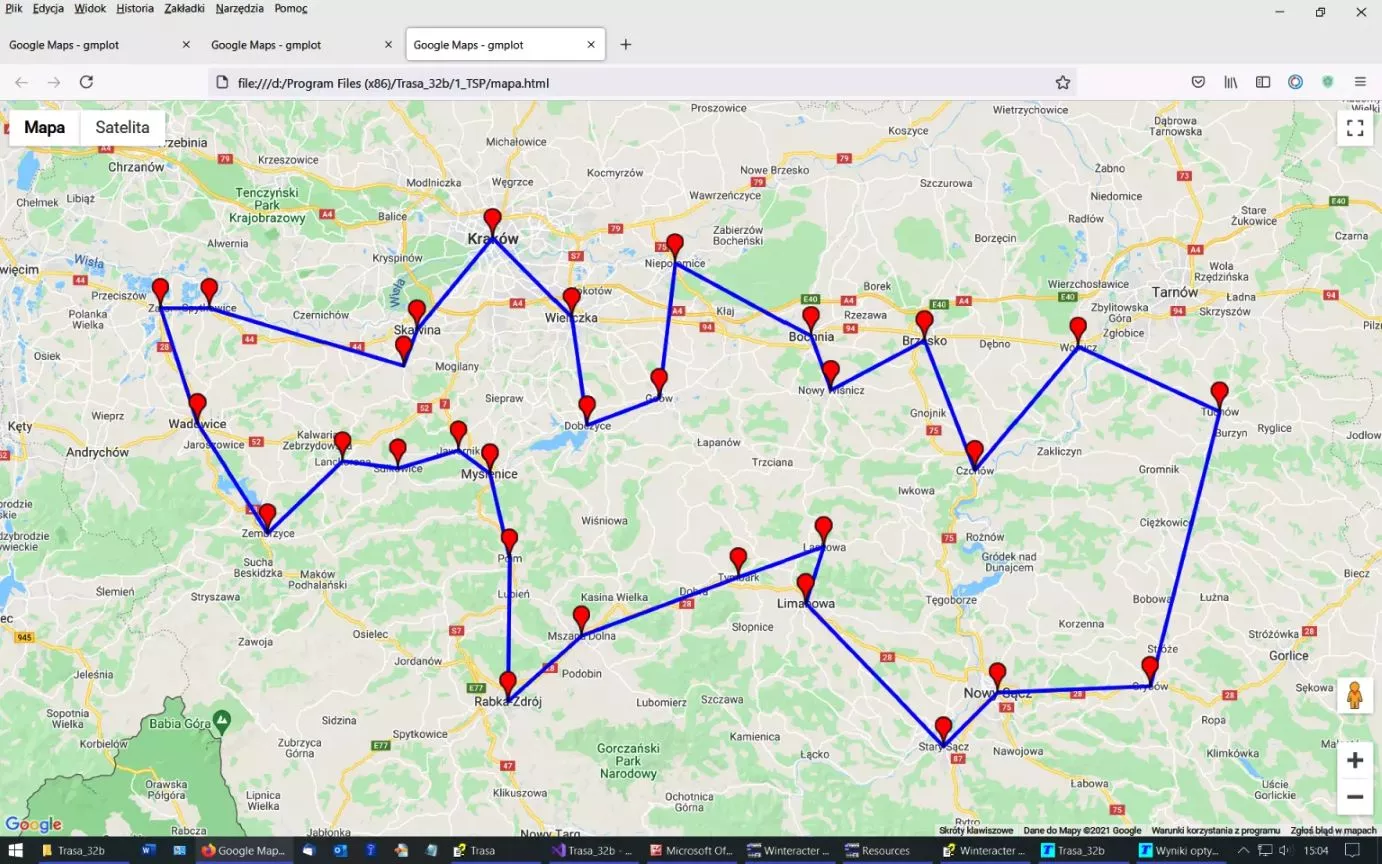
TSP - mapy Google: 30 lokalizacji: zestaw 30 lokalizacji, trasa początkowa oraz trasa po optymalizacji
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
TSP - mapy Openrouteservice: 60 lokalizacji w Poznaniu
60 lokalizacji (TSP): zestaw lokalizacji, trasa początkowa oraz trasa po optymalizacji oraz SD-MTSP dla 60 lokalizacji: pojazd_1, pojazd_2 i pojazd_3
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
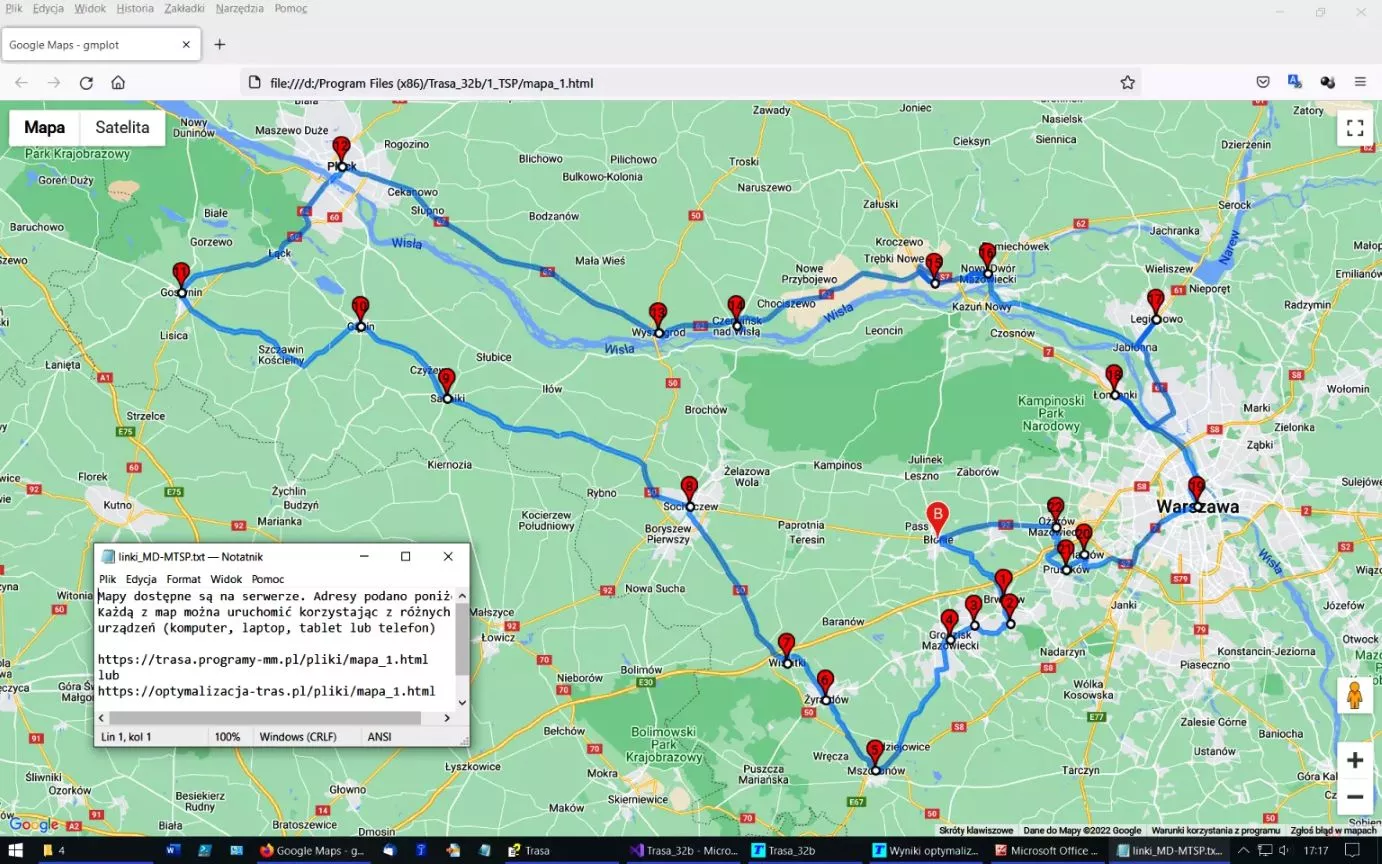
95 lokalizacji (TSP): zestaw lokalizacji, trasa początkowa oraz trasa po optymalizacji i MD-MTSP dla 95 lokalizacji: pojazd_1, pojazd_2, pojazd_3, pojazd_4
{kind=link}
{kind=link}
{kind=link}
{kind=link}
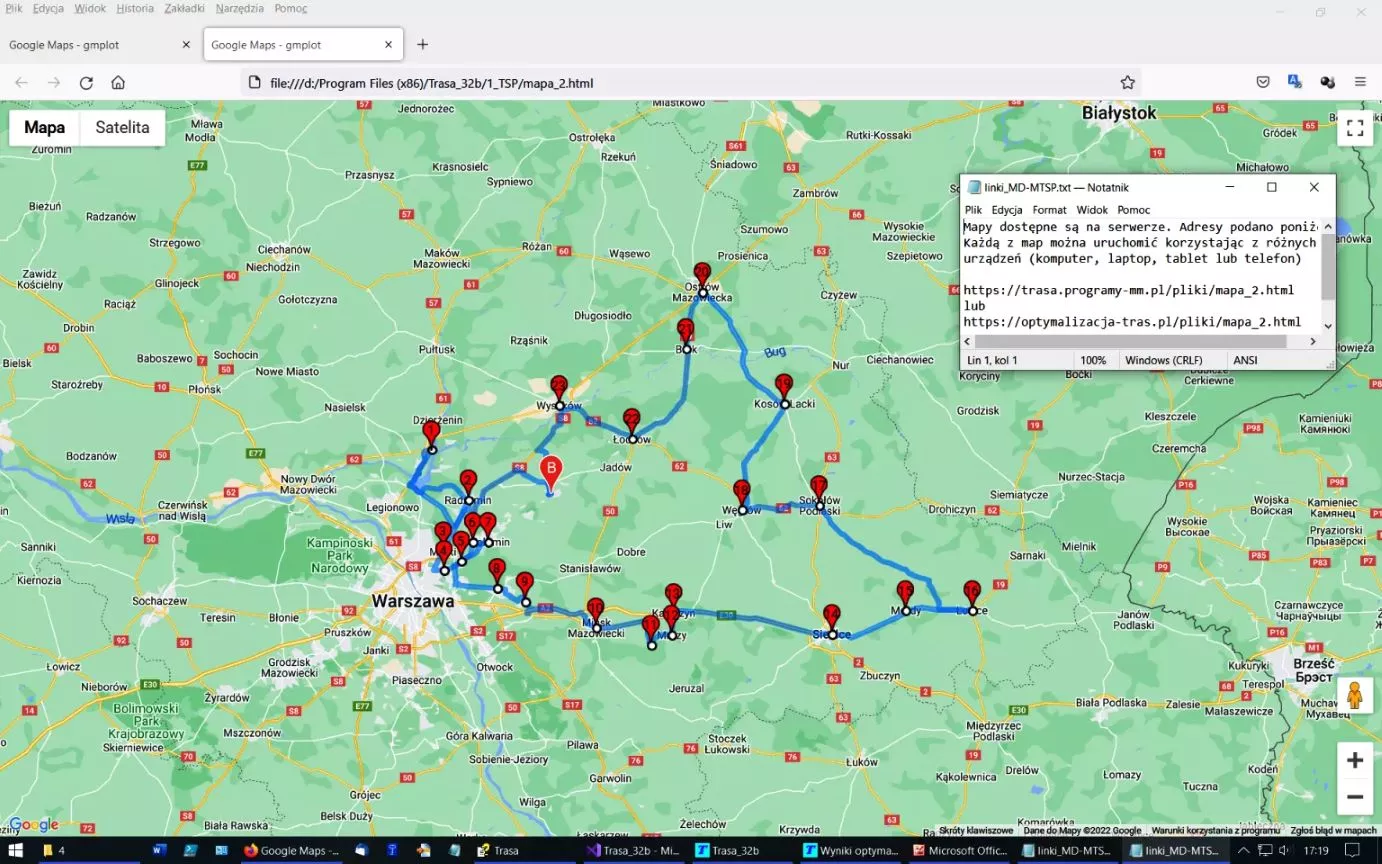{kind=link}
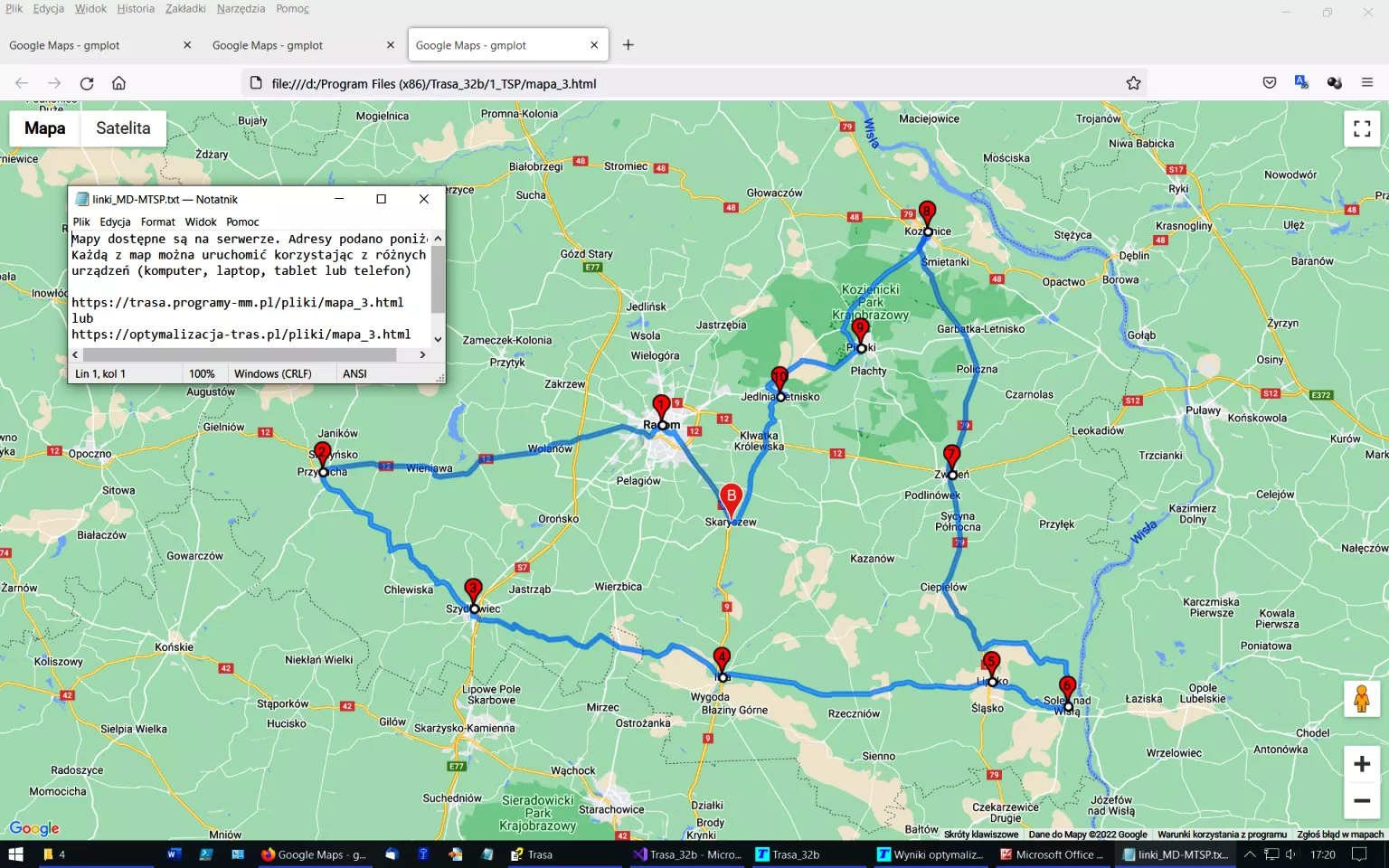{kind=link}
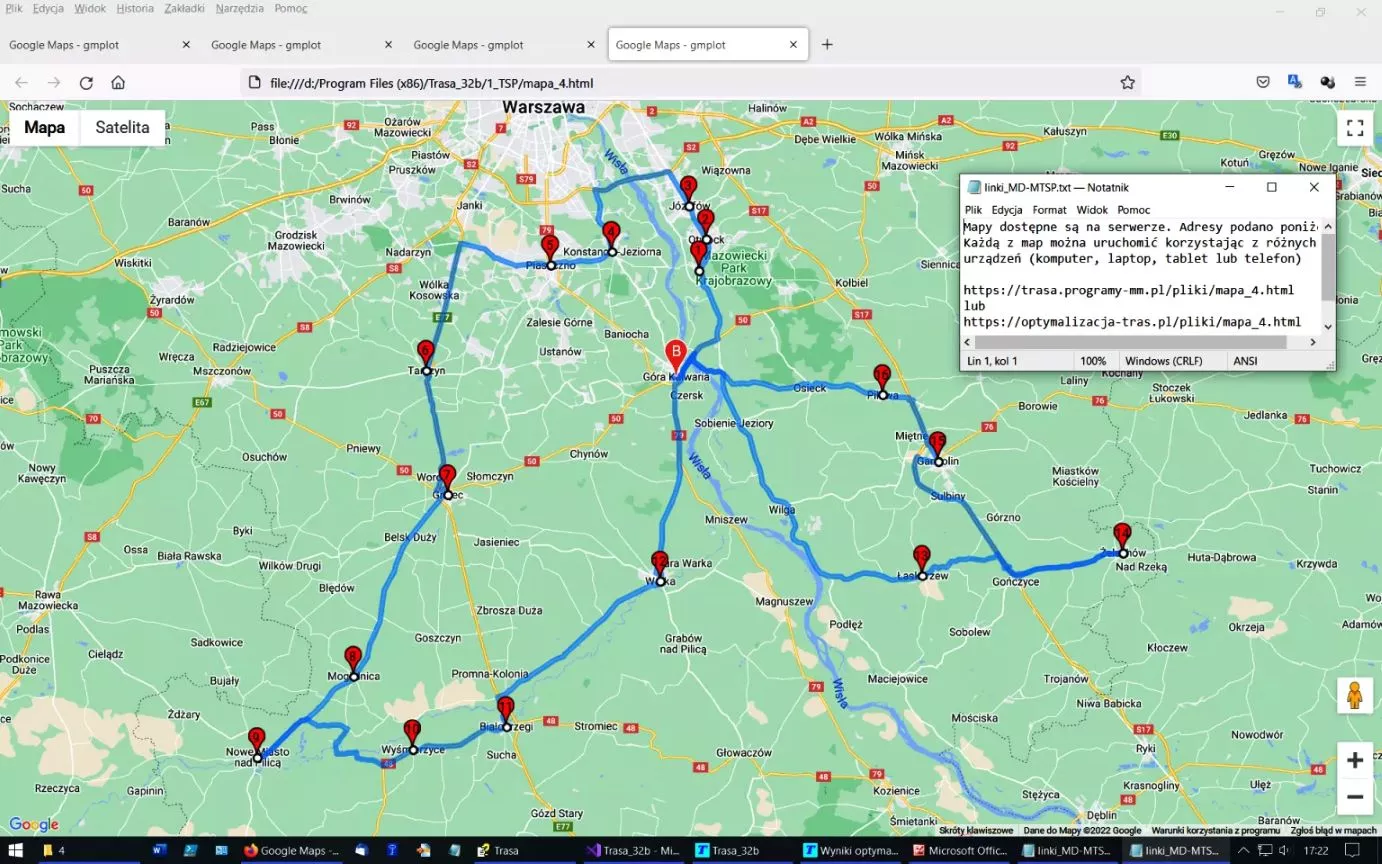{kind=link}
Program występuje w wersji 32-bitowej oraz 64-bitowej (umożliwiającej rozwiązywanie dużych zadań np. kilkadziesiąt tysięcy lokalizacji (miejscowości)). W obu przypadkach programy są realizowane z wykorzystaniem przetwarzania równoległego i mogą być zoptymalizowane pod określony procesor.
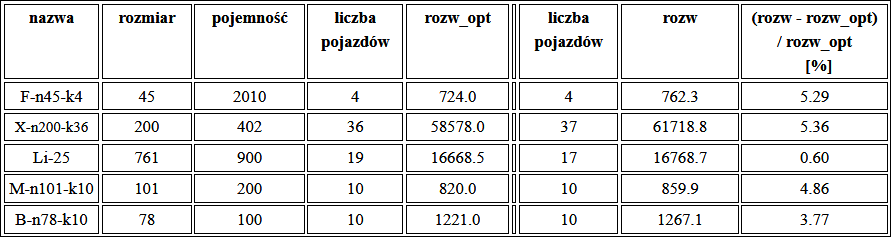
Poniżej przedstawiono przykładowe wyniki dla standardowych testów, dotyczące TSP. Z lewej strony tabeli pokazano rozwiązania optymalne a z prawej uzyskane programem Trasa. Pierwsza kolumna tabeli zawiera nazwę testu. Liczba umieszczona w nazwie testu to ilość punktów (lokalizacji).
Należy wziąć pod uwagę, że w przypadku programu Trasa, obliczenia były wykonywane z włączonym podglądem graficznym co powodowało wydłużenie czasu obliczeń.

Kolejna tabela przedstawia przykładowe wyniki dla standardowych testów, dotyczące CVRP. Z lewej strony tabeli pokazano rozwiązania optymalne a z prawej uzyskane programem Trasa. Pierwsza kolumna tabeli zawiera nazwę testu.